Professional Projects
May 2025 - July 2025
SUMMER INTERN, FORD MOTOR COMPANY

Chassis Controls Software & Systems Engineer - Research & Advanced Engineering Division
Dearborn, Michigan (US)
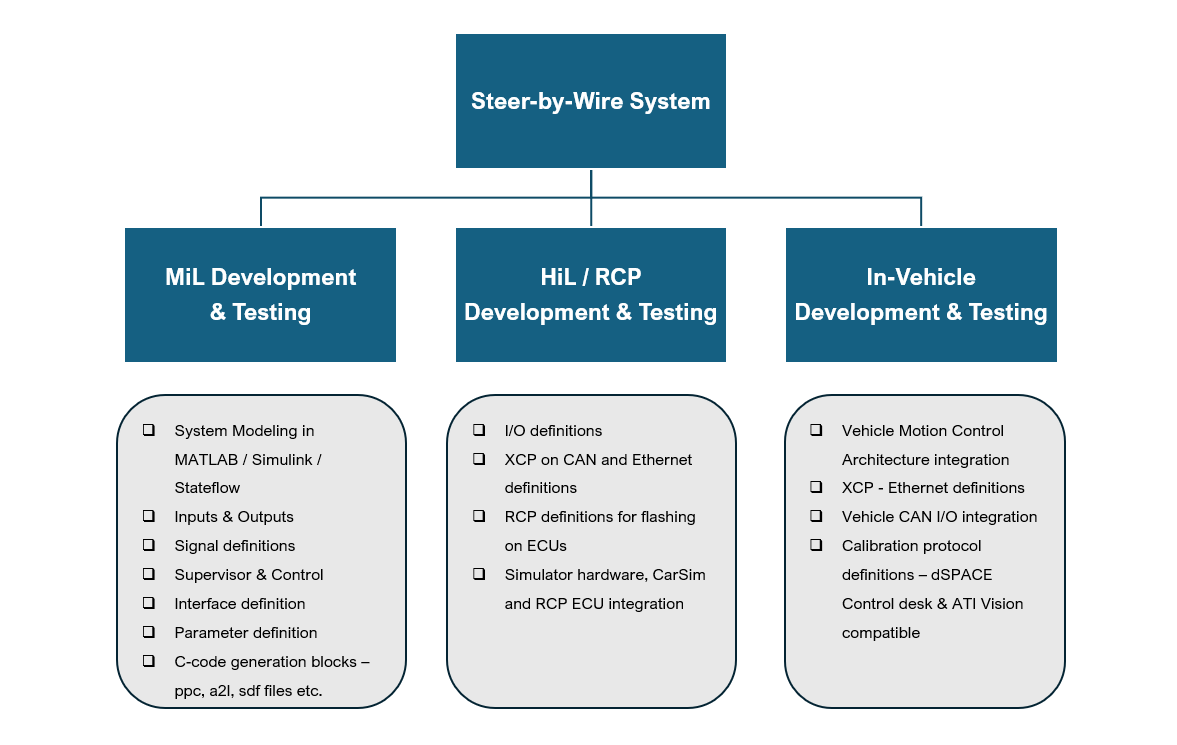
Steer-by-wire System
Led the development, integration and real-time validation of a dual redundant new
Steer-by-Wire concept
Responsibilities:
➤ Engineered steer-by-wire system hardware and established real-time CAN communication between
sensor and MicroAutoBox ECU
➤ Conducted system testing, calibration & data logging at Ford’s proving grounds, ensuring
functional reliability and robustness
➤ Integrated the control algorithm into the Vehicle Motion Control framework and maintained
versioning on GitHub
➤ Transitioned the calibration & data acquisition platform from dSPACE to ATI Vision to streamline
field tuning and validation workflows
➤ Collaborated with suppliers and cross-functional teams to ensure seamless hardware & software
integration
aligning with system use cases towards expected behavior
Steer-by-Wire System Architecture
Steer-by-Wire System Architecture
❮
❯
Jan 2024 to Apr 2025
DEEP ORANGE 16 INTERN, CLEMSON UNIVERSITY

Vehicle Dynamics & Controls team
Greenville, South Carolina (US)
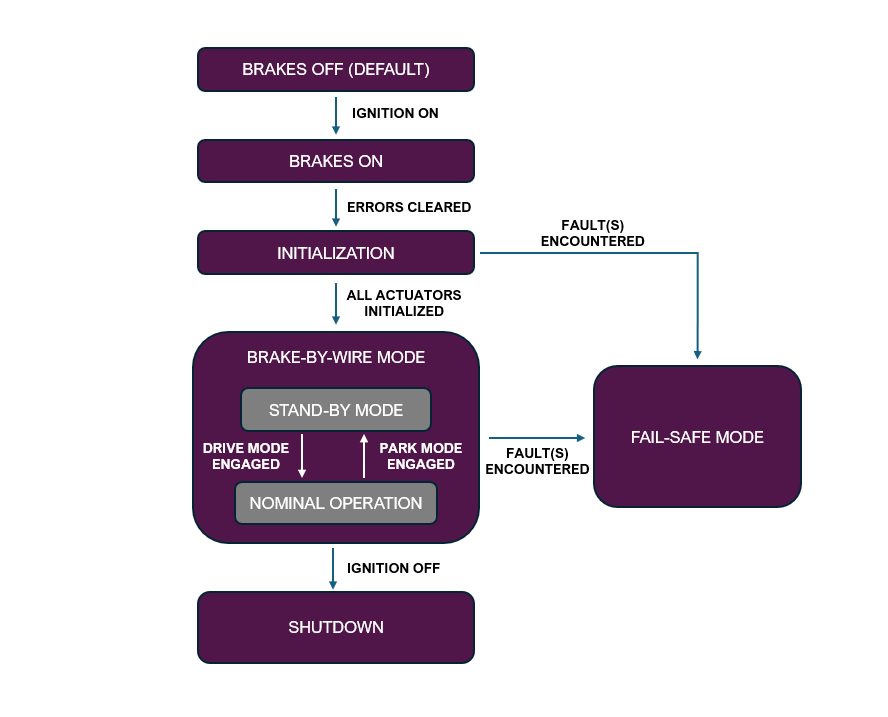
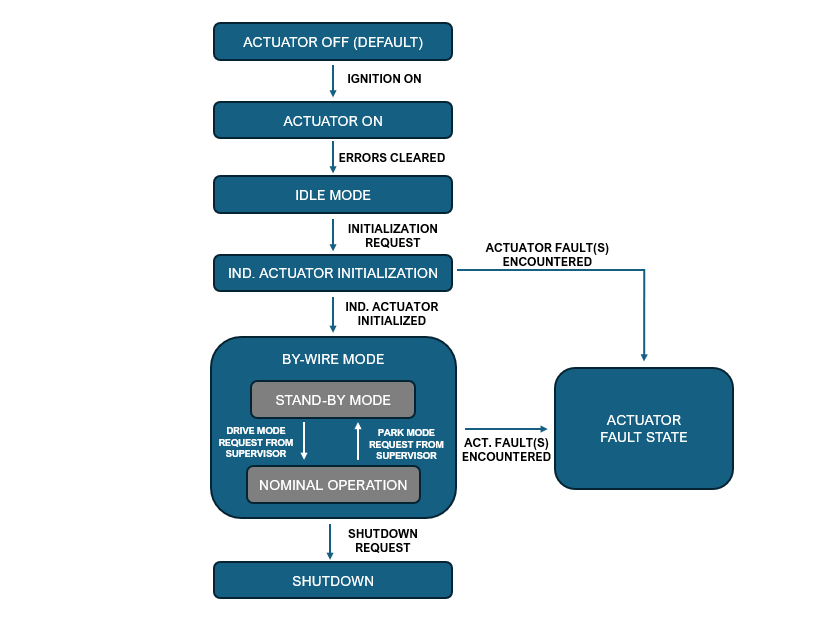
➤ Designed and validated a HiL bench test setup for Brembo’s Sensify brake-by-wire system, including
calibration, fault detection, and fail-safe logic using Simulink Stateflow
➤ Developed a brake supervisory controller and start-up state machine on a New Eagle Raptor ECU;
validated via SiL and HiL testing
➤ Executed real-time HiL tests with Raptor ECU to verify braking functions and system robustness
➤ Created a torque vectoring algorithm to replicate differential behavior in a 4-wheel hub motor
hybrid architecture
➤ Designed wiring harnesses and built a suspension HiL setup to test real-time control strategies
➤ Developed a custom HMI using the MoTeC C1812 display; implemented CAN-based GUI for live data
visualization and steering wheel button-based navigation
➤ Followed the V-model systems engineering process to define requirements, coordinate
cross-functional teams, and perform physical testing per US Army TOPs and FMVSS standards.
Supervisory State Machine Architecture
Individual Actuator State Machine Architecture
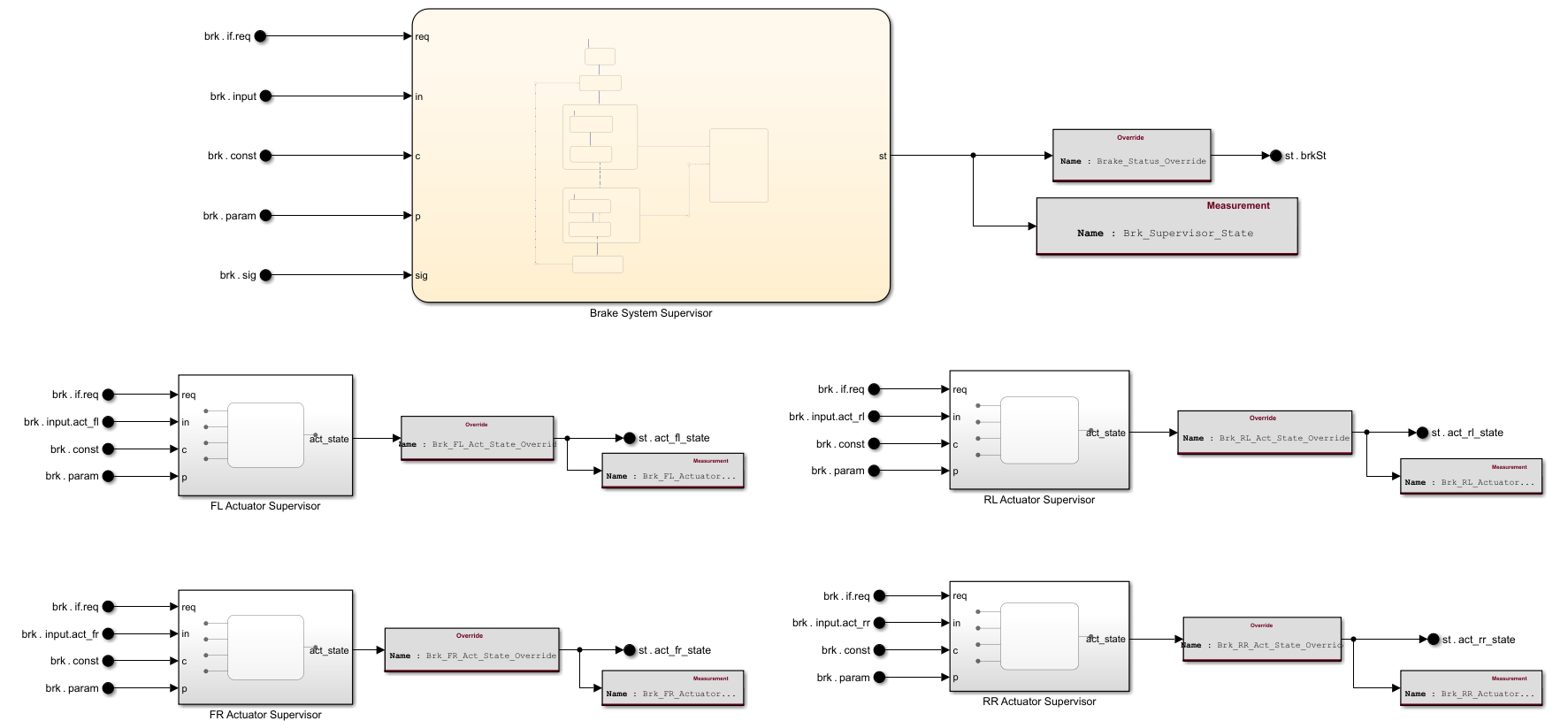
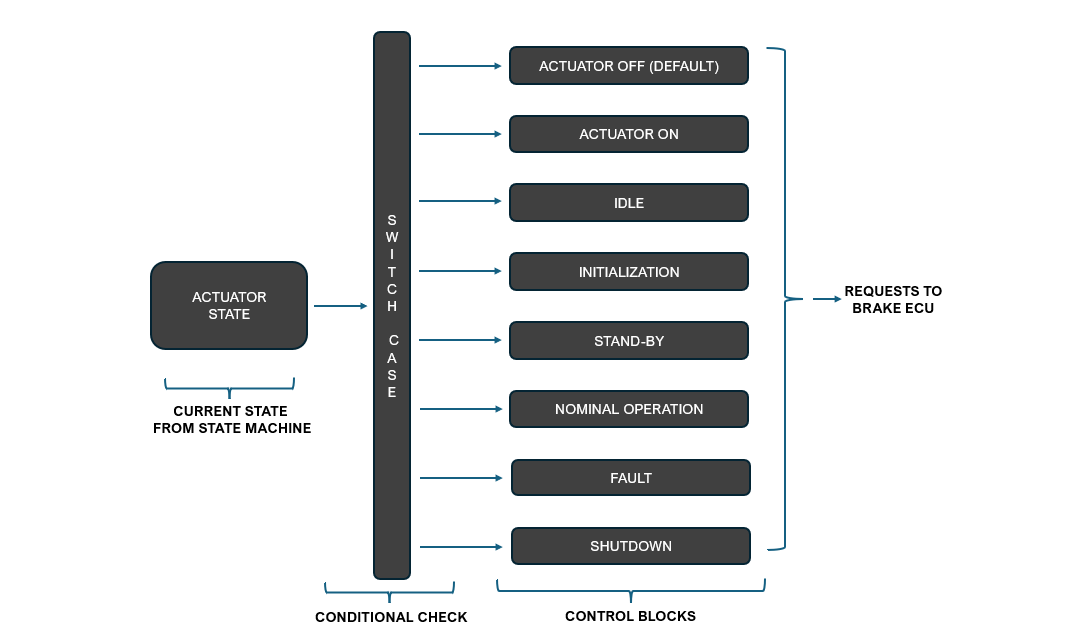
Brake System & Individual Actuator Supervisors
Control System Architecture
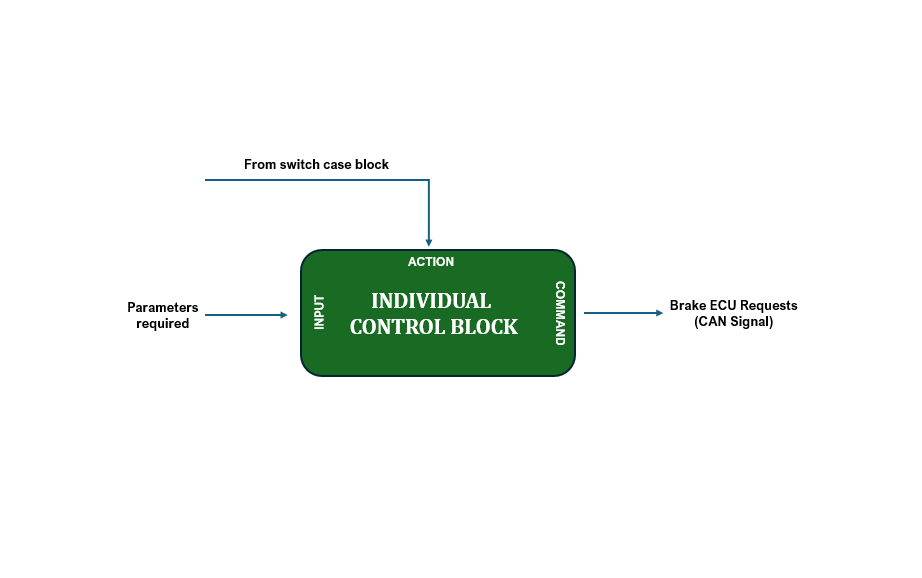
Individual Control Block Definition
❮
❯
May 2024 to Dec 2024
Graduate Research Assistant
Professor Dr. Matthias J. Schmid
Greenville, South Carolina (US)
➤ Served as Data Acquisition and Vehicle Dynamics Controls & Test Engineer for the Deep Orange 14
project, a U.S. Army research vehicle
➤ Instrumented BMW 535xi research vehicle for data acquisition and virtual modeling as part of
research activities at both in-house facilities and ITIC proving
ground. The tests conducted are as follows;
✔ 4-post shaker
✔ Skid pad
✔ Slalom
✔ Double lane change and
✔ Brake testing
Steering Pad
Testing at ITIC Proving Grounds
Steering Pad
Testing at ITIC Proving Grounds
With my
Professor Dr. Schmid
❮
❯
Aug 2018 to Jun 2023
ROYAL ENFIELD (GLOBAL HEADQUARTERS)

Assistant Manager - New Product Development (Chassis Testing & Validation)
Chennai, TamilNadu (India)
➤ Project Manager for chassis systems integration, scheduling project meetings
with cross-functional
teams to address development-stage challenges, conducting trials, root cause analysis, recommending
design modifications, and validating solutions. Established new internal testing procedures aligned
with ECE, FMVSS and Indian regulations
➤ Led as the ABS Development manager & test engineer , overseeing the testing and
validation of ABS
calibration programs to meet safety standards, homologation requirements, and subjective/objective
performance criteria. Managed alternate sourcing evaluations and final approvals while coordinating
weekly meetings with cross-functional teams to ensure project accountability
➤ Served as a Vehicle Performance Test Engineer , developing verification plans,
maintaining
validation reports and conducting testing activities to assess vehicle attributes, including brake
systems, ride and handling and ergonomics
➤ Gained hands-on expertise in prototype development, successfully building five motorcycle
prototypes from concept to SOP, with proficiency in tool handling and assembly
processes
Hunter Launch
Ride - Bangkok, Thailand
Dry Braking Test
- ABS Validation
Wet Braking Test
- ABS Validation
Wheelie Control
Test - Traction Control Validation
Hunter 350
Launch - Bangkok, Thailand
ABS Validation
in Proving Grounds
❮
❯